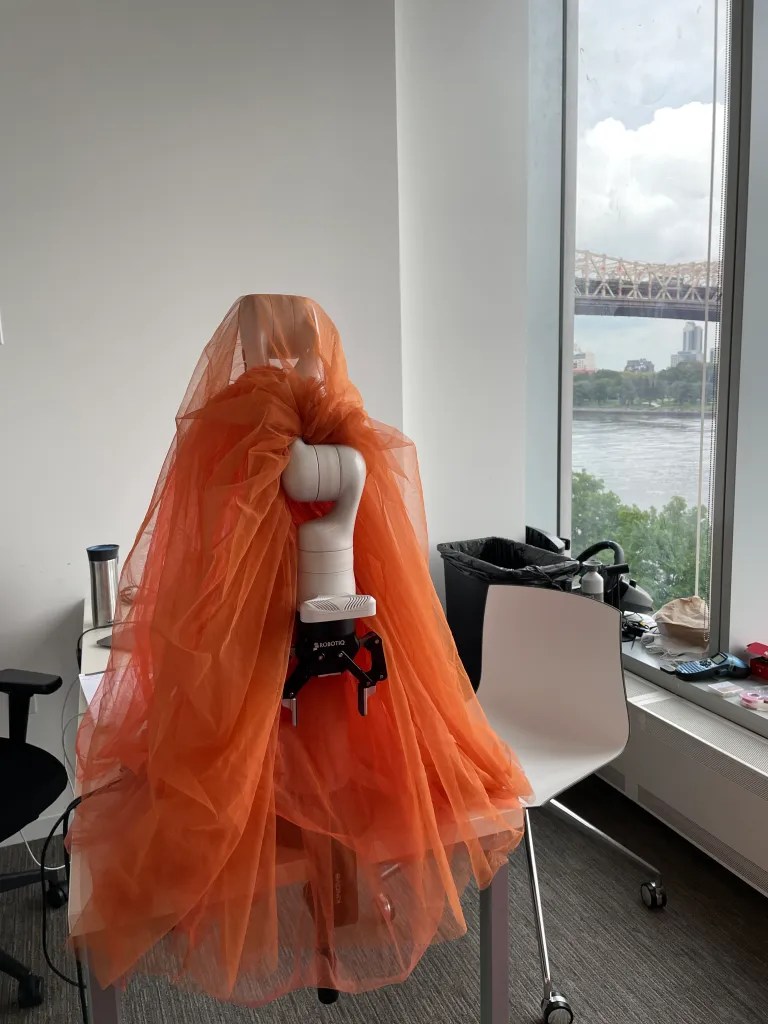
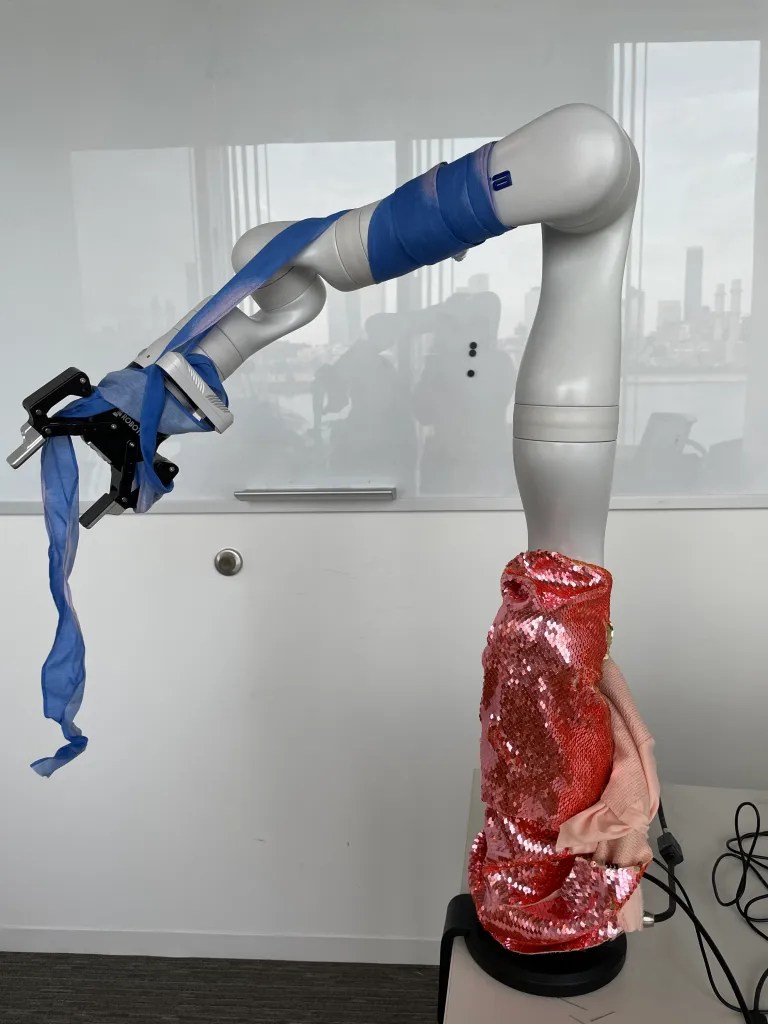
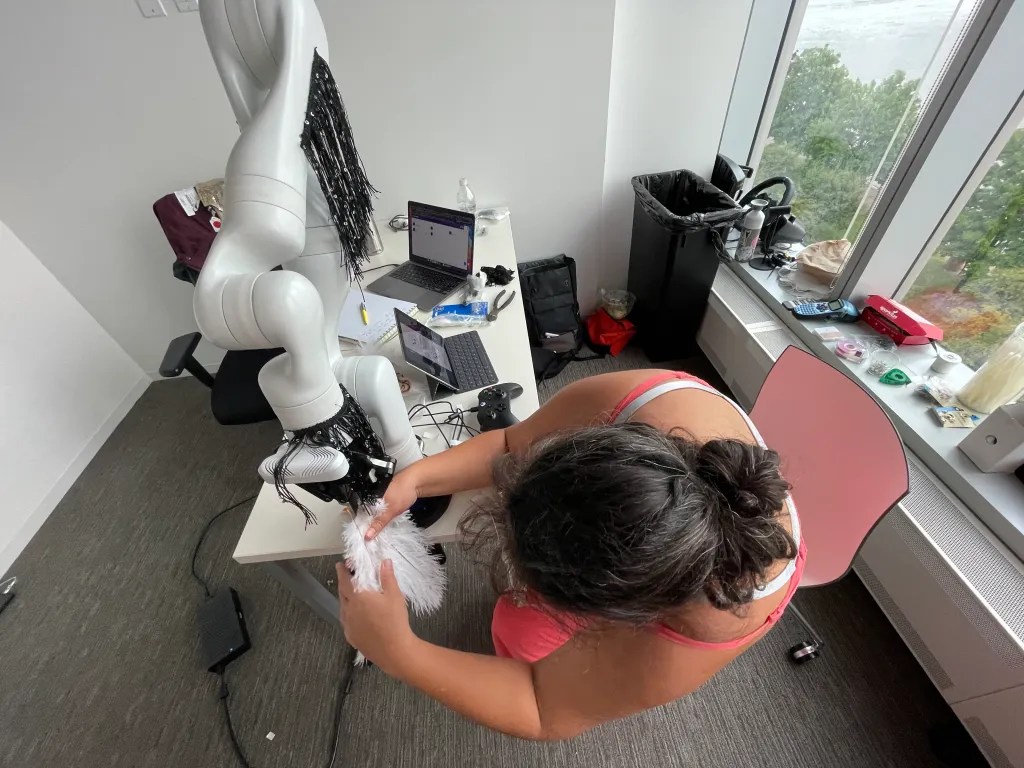
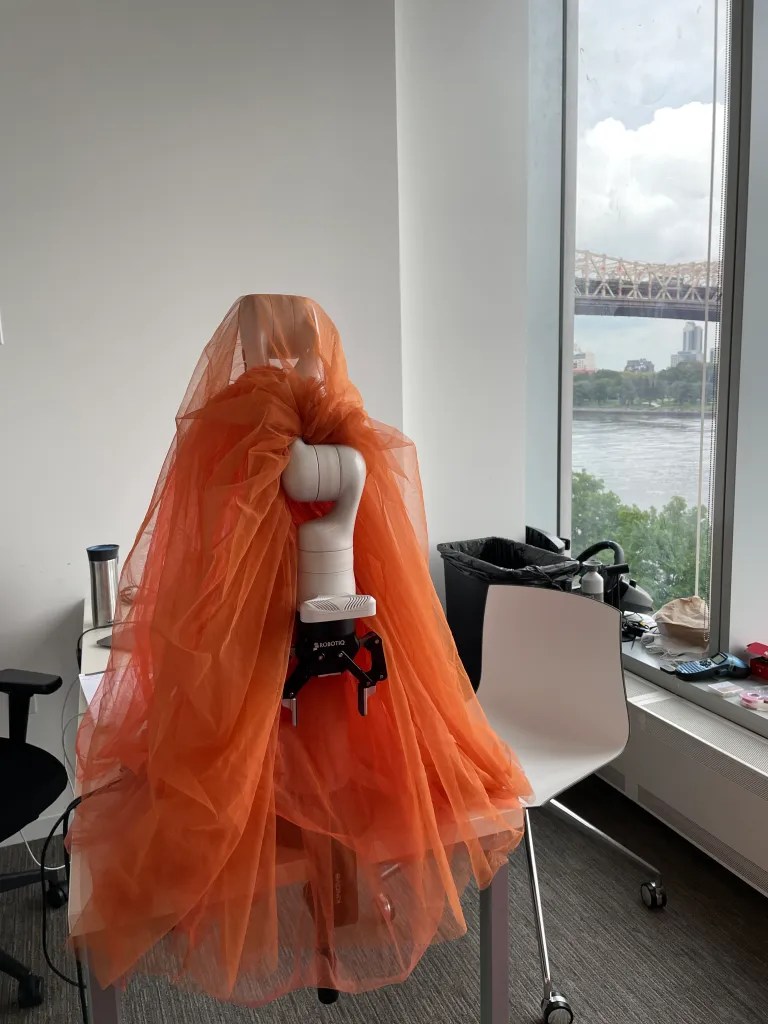
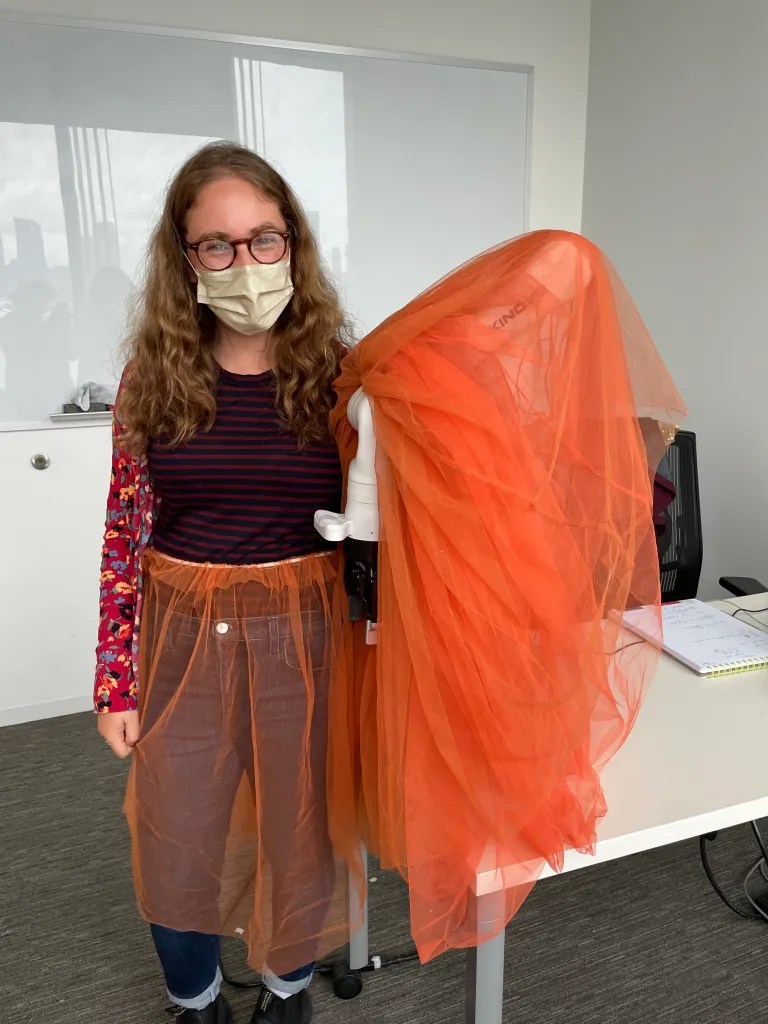
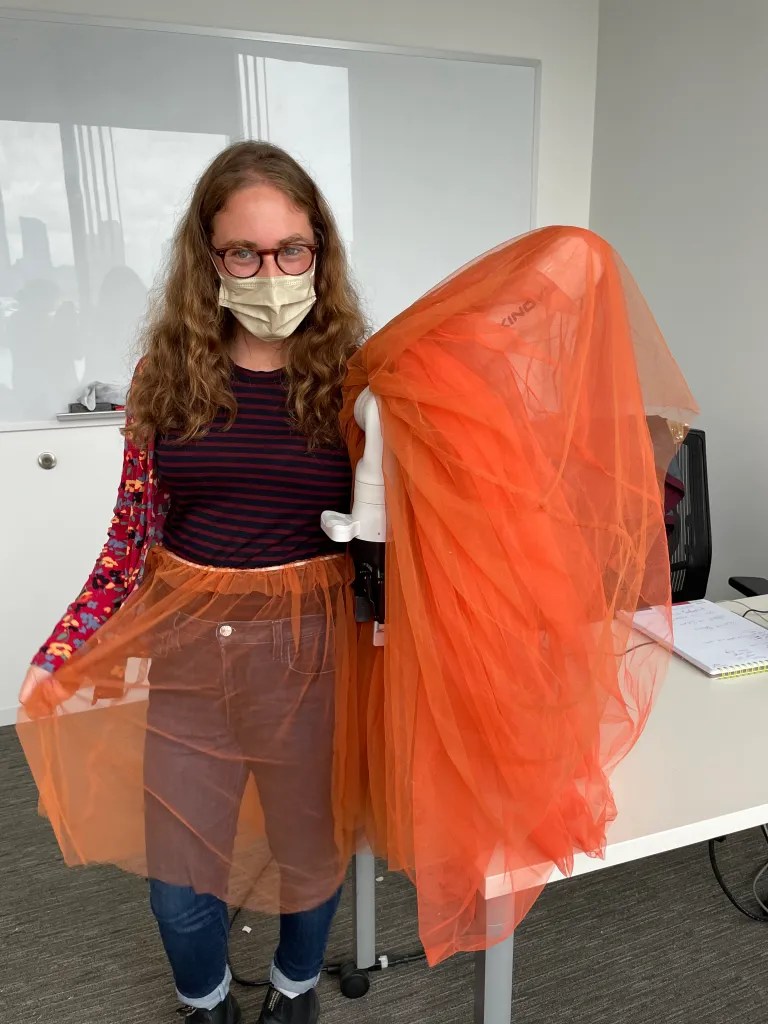
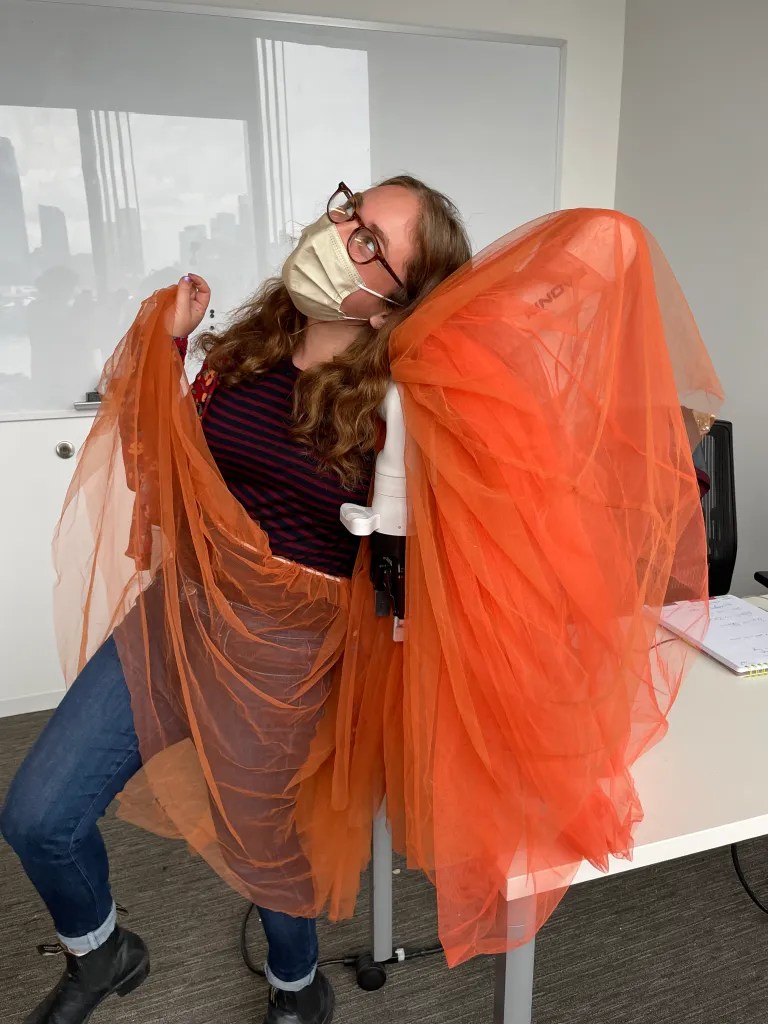
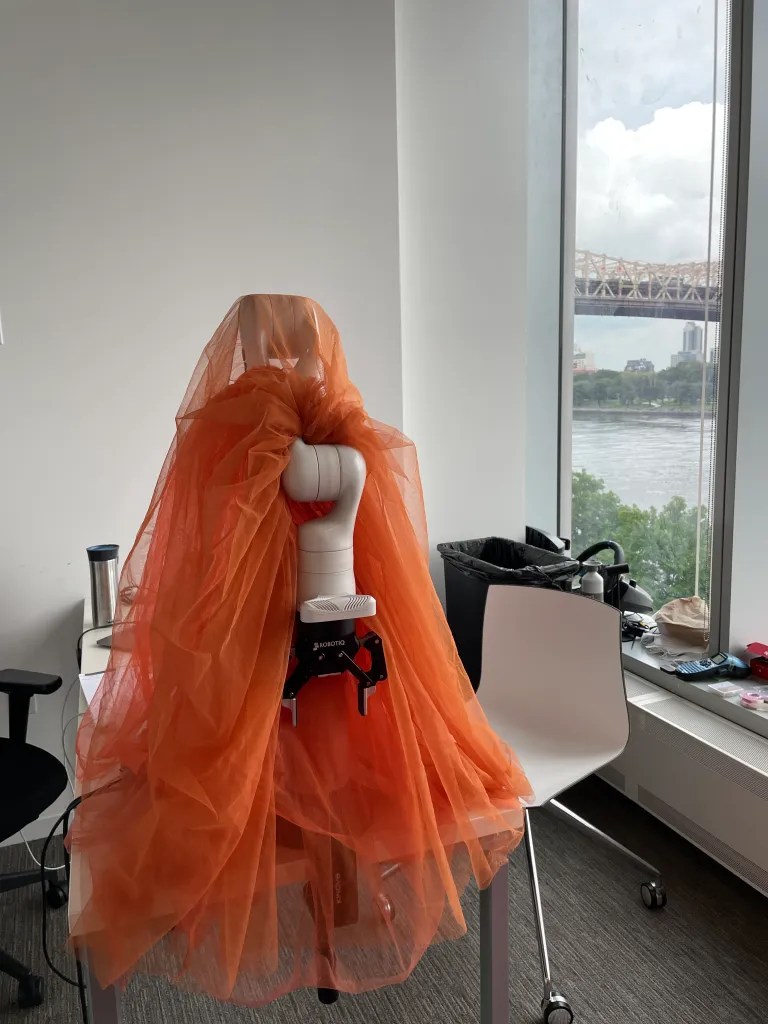
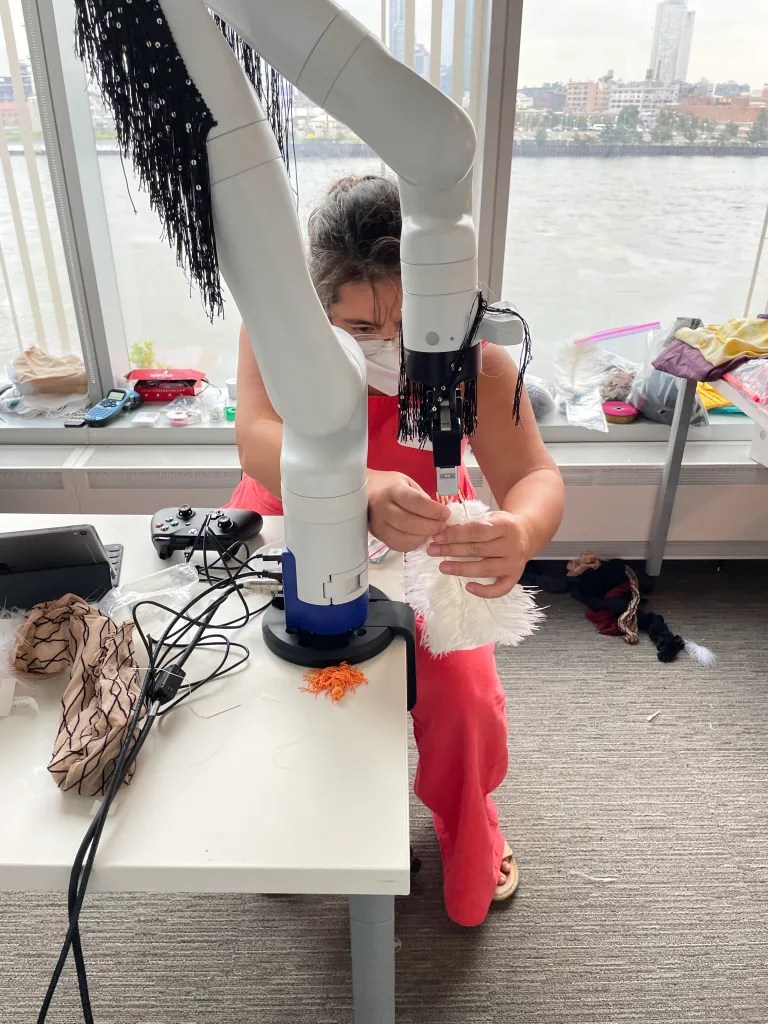
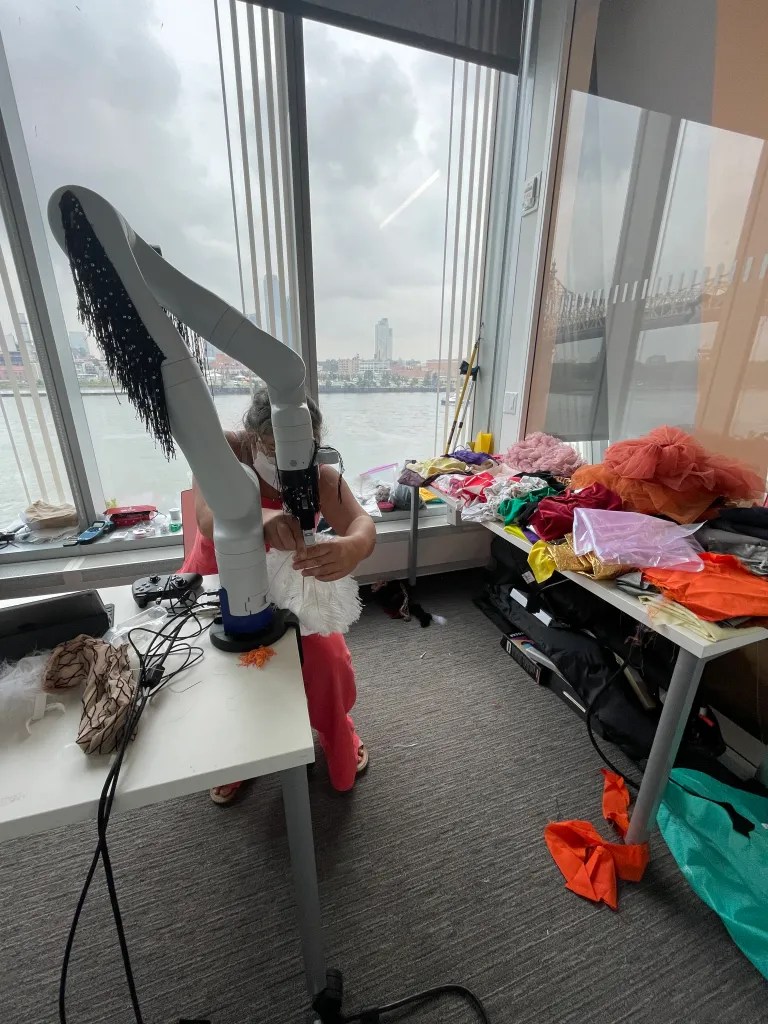
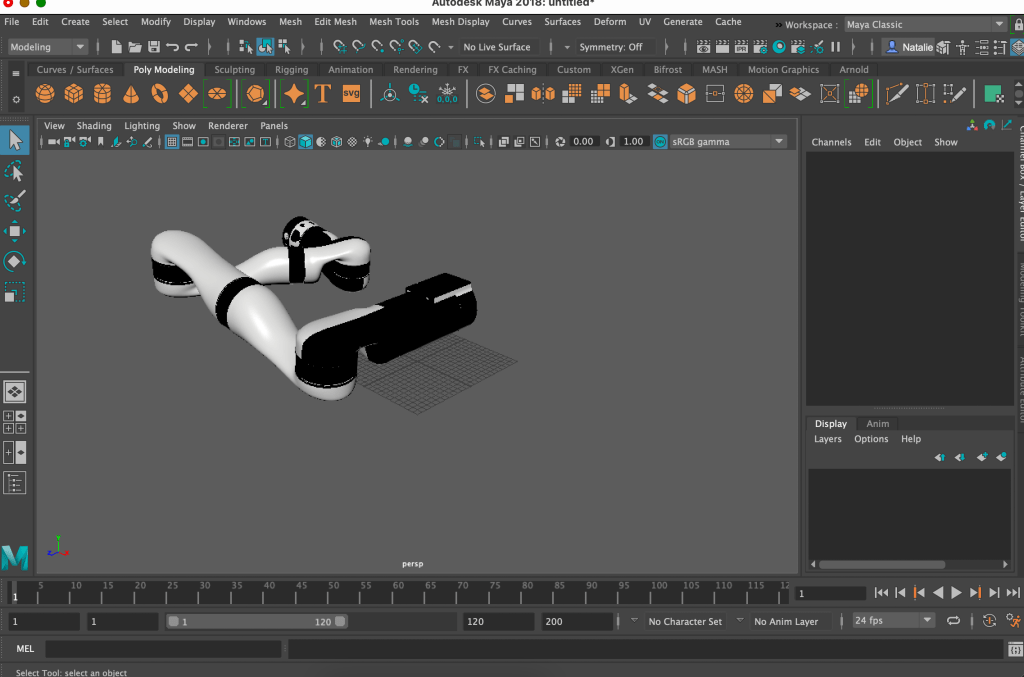
Kari Love and I explored forms and materials for dressing the Kinova Gen 3, a 7 degree of freedom robot arm. We were interested in how a variety of materials would move on a robot arm moving in a chroeographed way. We asked the questions, how might materials stay on the robot in movement? How can we ensure that the materials don’t get twisted at the joints of the robot arm? What is sexy clothes and motion for a robot?